Using the CMUcam on your robot is easy. This tutorial will detail using the CMUcam1.
Here is the CMUcam manual: http://www.seattlerobotics.com/CMUcamManualv15A.pdf
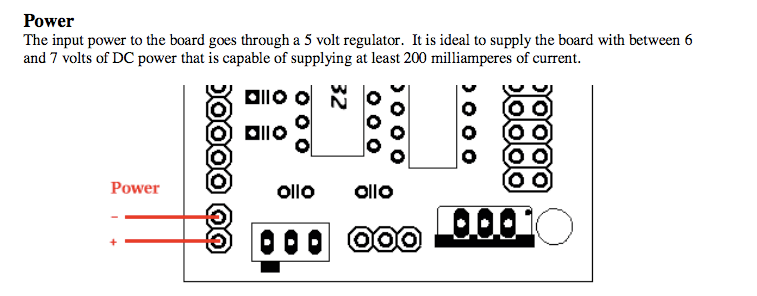
First apply power to the CMUcam as shown in this diagram:
Then connect the Data wires as shown in this diagram. Be sure to remove the Max232 chip.
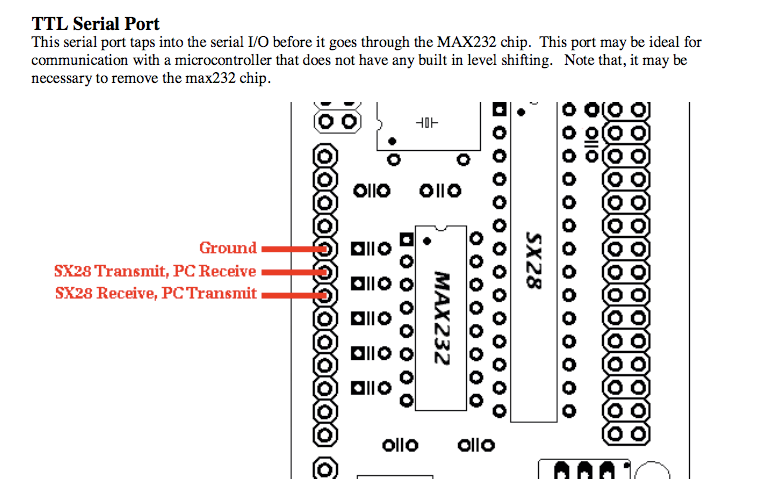
Connect the GND wire of the CMUcam to a GND pin on your microcontroller. Connect the SX28 Transmit pin to your Rx pin of the microcontroller( on the Axon I chose to use the Rx of UART0). Connect the SX28 Receive pin to your Tx pin of the microcontroller (on the Axon I chose the Tx of UART0).
Now that the electrical connections are set up , we move on to programming.
NOTE: The following code was made for the Axon microcontroller , but can easily be adapted.
UART Initialization:
uartInit(); // initialize the UART (serial port)
uartSetBaudRate(0, 115200); // set UARTE speed, for Bluetooth , this is the UART port
CMUcam Initialization
void CMUcam_Initialize(void)
{
rprintfInit(uart0SendByte);//change UART to CMUcam
rprintf("RS"); // Reset CMUcam
delay_ms(500); // wait 500 milliseconds
rprintf("cr 18 44"); // Set CMUcam to AutoExposure
delay_ms(500); // wait 500 milliseconds
rprintf("RM 1"); // Set CMUcam to Raw Serial Mode
delay_ms(500); // wait 500 milliseconds
rprintfInit(uart1SendByte);//change UART to USB
rprintf("CMUcam Initialized"); // send out the message through USB
}
Set Tracking of CMUcam
rprintfInit(uart0SendByte);
rprintf("TC 90 250 0 20 0 20"); // set tracking to this specific color// format is minRed maxRed minGreen maxGreen minBlue maxBlue
delay_us(500); // wait 500 microseconds
Get Tracking Data
int CMUcam_MiddleMass(void) //echos # of characters expected for each command
{
int temp; // set up temporary variable
int counter=0; //set the counter to 0
int echo_counter=0; // set the echo_counter to 0
int temp1;
rprintfInit(uart1SendByte);//change UART to bluetooth
temp = uart0GetByte(); // Get a Byte
while (temp != 255) { // Keep on getting new bytes until the byte = 255
temp = uart0GetByte();
}
rprintf("Start= %d ",temp);
temp = uart0GetByte(); // Get a Byte
while (temp != 77) { // Keep on getting new bytes until the byte = 'M'
temp = uart0GetByte();
}
rprintf("M= %d ",temp);
echo_counter = 8; // expect 8 bytes ( 0 thru 7)
while(1) {
temp=uart0GetByte();//returns -1 if no data present
response[counter]=temp;//store values into an array
counter++; // add one to "counter" array
if(counter == echo_counter) // once the counter equals the echo_counter
{
// successfully captured the entire M packet
uartFlushReceiveBuffer(0);//flush out receive camera buffer to stop phase shifting
delay_us(100);
temp1 = response[0];
rprintf("MiddleMassX= %d ",temp1);
temp1 = response[1];
rprintf("MiddleMassY= %d ",temp1);
temp1 = response[2];
rprintf("MinimumX= %d ",temp1);
temp1 = response[3];
rprintf("MinimumY= %d ",temp1);temp1 = response[4];
rprintf("MaximumX= %d ",temp1);
temp1 = response[5];
rprintf("MaximumY= %d ",temp1);temp1 = response[6];
rprintf("Pixels= %d ",temp1);temp1 = response[7];
rprintf("Confidence= %d ",temp1);
return response[0]; // return MiddleMass of X axis
} //endif
} // end while
} // end sub
Sample Program
int data;
CMUcam_Initialize(); // Initialize CMUcam
// format is minRed maxRed minGreen maxGreen minBlue maxBlue
rprintfInit(uart0SendByte);
rprintf("TC 90 250 0 20 0 20"); // set tracking to this specific color
delay_us(500); // wait 500 microsecondswhile(1) {
data = CMUcam_MiddleMass(); // get the MiddleMass value
if (data > 40) {
// do stuff, turn left, etc.
} //end if
if (data <40)>
// do stuff, turn right, etc.
} // end if
} //end while
Heres an example of a robot you can create using my code:








1 comment:
Hi there, can i have more detail about your project.
Post a Comment